| 位置決め・搬送用途向けACサーボモータ (New R シリーズ) |
| アプリケーション例カタログ | 簡単教示ツールカタログ | 購入ガイドカタログ |
 |
||||||||||||||||
| 動画のご紹介 | ||||||||||||||||
|

|
ダイアディックシステムズだけの簡単サーボシステム
|
| ● | 無償貸出制度で、お客様の実機で動作確認をしてからのご購入も可能です。 |
| ● |
I/O指令(ON/OFF信号)だけで 16点位置決め(位置、速度、加速度、トルク制御)が可能です。
|
| ● |
位置決めユニットやパルス発生器が不要な為、システムの簡素化と低コスト化が実現します。
|
| ● |
標準仕様で、シリアル通信 や 各種フィールドネットワーク への対応が可能です。
|
| ● | 停止時に微振動がないので、カメラによる検査装置に最適です。 |
| ● | 回生処理ユニットについては、こちらをご覧下さい |
 |
 |
 |
 |
 |
 |
| ● | いろいろな動かし方(制御方法)が可能です。 |
 |
|
| 用途に応じて、使い分けが可能です。 | |
| (1) パラレル接続 で使用 | (2) シリアル接続 で使用 |
| (3) 空圧(エアー)互換機能 で使用 | (4) セルフコントロール機能 で使用 |
| (5) フィールドバスへの対応 | (6) スイッチで動作 |
|
サーボモータ仕様
|
システム型式(ご注文型式) |
RSA0241 | RSA0242 | RCB0411 | RSA0411 | |
モータ型式 |
RMJ0231 | RMJ0232 | 一体型 | RMJ0411 | |
アンプ型式 |
RAD0211 | RAD0111 | |||
出力(BLモータ相当値)(注1) |
W | 20 | 50 | ||
最高回転数 |
r/min | 4,500 | |||
最大トルク |
N・m | 0.11 | 0.3 | ||
| kgf・cm | 1.1 | 3.1 | |||
ロータイナーシャ |
kg・m2 | 0.022×10-4 | 0.076×10-4 | ||
許容最大負荷 イナーシャ限界 (注2) |
kg・m2 | 「回転数−許容最大イナーシャ」 の グラフ を参照 |
|||
許容摩擦負荷 |
N・m | 0.03 | 0.083 | ||
許容アンバランス負荷(注3) |
N・m | 0.03 | 0.075 | ||
許容ラシ゛アル荷重 (注4) |
N / kgf | 19.6 / 2 以下 | |||
許容スラスト荷重 |
N / kgf | 4.9 / 0.5 以下 | 9.8 / 1 以下 | ||
位置速度検出器 |
インクリメンタルエンコーダ 200P/R (4定倍 800P/R) |
||||
アンプ / モータ重量 |
g | 約 400 / 500 | 約 550 (モータ含む) |
約 400 / 500 | |
| 外形図 | 図1へ | 図2へ | 図3へ | 図4へ | |
システム型式(ご注文型式) |
RSA0611 | RSA1211-0101-TS1 | RSA1611 | |
|
モータ型式 |
RMJ0611 | RMJ1211-01 | RMJ1611 | |
|
アンプ型式
|
RAD0311 | RAD2311-01 | RAD0611 | |
|
出力(BLモータ相当値)(注1)
|
W | 90 | 100 | 200 (動力電源24V) 300 (動力電源48V) |
|
最高回転数
|
r/min | 4,500 | 4,500 | 4,500 |
最大トルク |
N・m | 0.6 | 1.2 | 1.6 |
| kgf・cm | 6.1 | 12.2 | 16.3 | |
|
ロータイナーシャ |
kg・m2 | 0.115×10-4 | 0.269×10-4 | 0.269×10-4 |
許容最大負荷
イナーシャ限界 (注2) |
kg・m2 | 「回転数−許容最大イナーシャ」 の
グラフ を参照 |
||
許容摩擦負荷
|
N・m | 0.229 | 0.5 | 0.5 |
許容アンバランス負荷(注3)
|
N・m | 0.229 | 0.5 | 0.5 |
許容ラシ゛アル荷重 (注4)
|
N / kgf | 49 / 5 以下 | ||
許容スラスト荷重
|
N / kgf | 19.6 / 2 以下 | ||
位置速度検出器 |
インクリメンタルエンコーダ 200P/R (4定倍 800P/R) |
|||
アンプ / モータ重量 |
g | 約 400 / 650 | 約 400 / 1200 |
約 400 / 1200 |
| 外形図 | 図5へ | |||
| 注1. | Max1000r/minの三角駆動時の値 |
| 注2. | 推奨許容最大負荷イナーシャ限界は目安とお考え下さい。詳しくは下図の回転数と許容最大イナーシャのグラフを参照して下さい |
| 注3. | 位置決め電流制限値を下げて使用する場合は許容アンバランス負荷の値も下がります |
| 注4. | ラジアル荷重の印加点は軸端から10mm内側の位置とします |
|
サーボモータ特性グラフ
(速度−トルク特性) |
 |
 |
||
 |
 |
||
|
ギア付サーボモータ仕様 |
|
システム型式(ご注文型式)
|
RSA0611-G1
|
RSA0611-G2
|
|
|
モータ型式
|
RMJ0611-G1 | RMJ0611-G2 | |
|
アンプ型式
|
RAD0311 | RAD0311 | |
|
最高回転数
|
r/min | 600 |
300
|
|
減速比
|
1/5 | 1/10 | |
|
最大トルク
|
N・m | 1.5 | 2.5 |
| kgf・cm | 15.3 | 25.5 | |
|
ロータイナーシャ
|
kg・m2 | 0.14×10-4 | |
|
許容ラジアル荷重
|
N / kgf | 49 / 5 以下 (注1) | |
|
許容スラスト荷重
|
N / kgf | 29.4 / 3 以下 | |
|
バックラッシュ
|
min | 120 | |
|
位置速度検出器
|
インクリメンタルエンコーダ 1000P/R (4逓倍 4000 P/R) |
インクリメンタルエンコーダ 2000P/R (4逓倍 8000 P/R) |
|
|
アンプ / モータ重量
|
g | 約 400 / 900 | |
|
外形図
|
図6へ | ||
| 注1. | ラジアル荷重の印加点は、軸端から10mm内側の位置とします |
| 注2. | ラジアル荷重の印加点は、シャフト軸端から20mm内側の位置とします |
| ※. | 使用条件として、正転、逆転を繰り返す用途、急加速、急減速で動かす用途についてはご相談ください |
|
ギア付サーボモータ特性グラフ
(速度−トルク特性) |
 |
||
|
高精度ギア付きサーボモータ仕様
|
システム型式(ご注文型式) |
RSA0241-G5 -10-0101 (シャフトDカット) |
RCSA0242-G5 -10-0101 (シャフトDカット) |
RCB0411-G5 -06-02 (シャフトキー溝) |
||
モータ型式(保守用部品型式) |
RMJ0231-G5-10-01 | RMJ0232-G5-10-01 | 一体型 | ||
アンプ型式(保守用部品型式) |
RAD0211-01 | RAD0211-01 | |||
最高回転数 |
r/min | 450 | 750 | ||
減速比 |
1/10 | 1/6 | |||
最大トルク |
N・m | 0.8 | 1.4 | ||
| kgf・cm | 8.2 | 14.3 | |||
ロータイナーシャ |
kg・m2 | 0.018×10-4 | 0.078×10-4 | ||
許容ラシ゛アル 荷重 (注1) |
N / kgf | 49 / 5 以下 | 118 / 12 以下 | ||
許容スラスト荷重 |
N / kgf | 24.5 / 2.5 以下 | 59 / 6 以下 | ||
位置速度検出器 インクリメンタルエンコーダ |
2000P/R、 (4定倍 8000P/R) |
1200P/R、 (4定倍 4800P/R) |
|||
バックラッシュ |
min | 60 | 30 | ||
アンプ/モータ重量 |
g | 400/350 | 900(モータ含む) | ||
外形図 |
図7へ | 図9へ | |||
システム型式 (ご注文型番) |
RSA0411-G5 -06-0201 (シャフトキー溝) |
RSA0611-G8 -05-0201 (シャフトキー溝) |
RSA1211-G8 -05-0201 (シャフトキー溝) |
||
モータ型式 |
RMJ0411- G5-06-02 |
RMJ0611- G8-05-02 |
RMJ1211- G8-05-02 |
||
アンプ型式 |
RAD0111-01 | RAD0311-01 | RAD2311-01 | ||
最高回転数 |
r/min | 750 | 850 | 850 | |
減速比 |
1/6 | 1/5 | 1/5 | ||
最大トルク |
N・m | 1.4 | 3 | 5 | |
| kgf・cm | 14.3 | 31 | 51 | ||
ロータイナーシャ |
kg・m2 | 0.078×10-4 | 0.215×10-4 | 0.369×10-4 | |
許容ラシ゛アル 荷重 (注1) |
N / kgf | 118 / 12 以下 | 600 / 61.2 以下 | 600 / 61.2 以下 | |
許容スラスト荷重 |
N / kgf | 59 / 6 以下 | 300 / 30.6 以下 | 300 / 30.6 以下 | |
バックラッシュ |
min | 30 | 7 | 7 | |
位置速度検出器 インクリメンタルエンコーダ |
1200 P/R、 (4定倍 4800 P/R) |
1000 P/R、 (4定倍 4000 P/R) |
1000 P/R、 (4定倍 4000 P/R) |
||
アンプ/モータ重量 |
g | 約 400 / 850 | 約 400 / 1650 | 約 400 / 2200 | |
外形図 |
図10へ | 図11へ | |||
| 注1. | ラジアル荷重の印加点は軸端から10mm内側の位置とします |
|
高精度ギア付サーボモータ特性グラフ
(速度−トルク特性) |
 |
 |
||
 |
|||
|
全モータ共通電気的仕様
|
| 入力電源 | 動力電源 | DC24V±10% 、最大2.0A | |
| RSA0241,RSA0242,RCB0411,RSA0411 RSA0241-G5-10-0101,RSA0242-G5-10-0101 RCB0411-G5-06-02,RSA0411-G5-06-0201 |
|||
| 動力電源 | DC24V±10% 、最大3.0A | ||
| RSA0611,RSA1211-0101 RSA0611-G1,RSA0611-G2 RSA0611-G8-05-0201,RSA1211-G8-05-0201 |
|||
| 動力電源 | DC24V±10% 、最大6.2A / DC48V±5% 、最大6.2A | ||
| RSA1611 | |||
| 入力電源 | 制御電源 | DC24V±10% 、最大0.2A | |
| 入/出力 信号 |
パラレル 入力信号 |
信号名 | DC24V系DI/DOインターフェース(コネクタPIO)、 目標位置番号(4ビットバイナリ:PC1,PC2,PC4,PC8)、 +/-方向回転禁止(INH+,INH-)、スタート(CSTR)、 軸移動インターロック(ILK) |
| 入力電流 | 最大4mA/ポート(シンクタイプの出力回路と接続して下さい) | ||
| パラレル 出力信号 |
信号名 | DC24V系DI/DOインターフェース(コネクタPIO) 完了位置番号(4ビットバイナリ:PM1,PM2,PM4,PM8 ※但し、RCB0411,RCB0411-G5にはこの信号はありません)、 位置決め完了(PFIN)、アラーム(ALM)、 ゾーン信号(ZONE)、原点復帰完了(ZFIN) |
|
| 出力電流 | 最大30mA/ポート(メカシリンダはオープンコレクタ出力です) | ||
| シリアル信号 | シリアルインターフェース(コネクタSIO)、+5V,0V,S+,S- | ||
| 保護機能 | バンクデータエラー、エンコーダ停止判定エラー、エンコーダカウンタ異常、 原点出し時の設定スピードオーバー、E2PROMチェックサムエラー、 過速度、暴走、動力電源過電圧、回生電圧異常、偏差カウンタ異常、 過負荷、エンコーダ断線(A,B共、Aのみ、Bのみ、 ※RCB0411,RCB0411-G5にはこの機能はありません) |
||
| LED表示 | RDY(ready),ALM(alarm) ※RCB0411,RCB0411-G5は表示なし | ||
| アンプ 使用環境 条件 (注1) |
使用温度 | 0〜55℃ ※RCB0411,RCB0411-G5は0〜40℃ | |
| 保存温度 | -20〜60℃ | ||
| 使用・保存湿度 | 20〜80%RH以下 ※但し、結露なきこと | ||
| 耐振動/耐衝撃 | 0.5G/2G (3回) | ||
| アンプ構造 | ベースマウント ※RCB0411,RCB0411-G5はモータ/アンプ一体型 | ||
| モータ絶縁階級 | E種 (※RSA0211 はB種) | ||
| モータ保護形式 | IP40 | ||
| 使用周囲 条件 |
使用温度 | 0〜40℃ | |
| 保存温度 | -20〜60℃ | ||
| 使用・保存湿度 | 90%RH ※但し、結露なきこと | ||
| 耐振動/耐衝撃 | 2.5G/10G (2回) | ||
| モータ取付方法 | フランジ取付け | ||
| 注1. | モータの耐振動/耐衝撃については、サーボモータの軸を水平に取り付けて場合です。尚、耐衝撃の値は上下方向に加わった場合です |
|
入出力信号名と機能
|
| 番号 | 名称 | 機能 |
||||||
| 1 | 電源 | +24V | 動力回路のDC24V電源の+側入力 | |||||
| 2 | 0V | 動力回路のDC24V電源の-側入力 | ||||||
| 3 | +24V | 制御回路のDC24V電源の+側入力 | ||||||
| 4 | 0V | 制御回路のDC24V電源の-側入力 | ||||||
| 5 | 入力 | PC1 | 目標位置番号入力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) | |||||
| 6 | PC2 | 目標位置番号入力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) | ||||||
| 7 | PC4 | 目標位置番号入力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) | ||||||
| 8 | PC8 | 目標位置番号入力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) | ||||||
| 9 | CSTR | 目標位置番号ストローブ入力(オフ⇒オンで目標位置番号の合計を読み込み移動開始) | ||||||
| 10 | *INH+ | +方向回転禁止入力(オフで禁止)、原点復帰時の+方向原点センサ入力 | ||||||
| 11 | *INH- | -方向回転禁止入力(オフで禁止)、原点復帰時の-方向原点センサ入力 | ||||||
| 12 | *ILK | 回転移動インターロック入力(一時停止モードと移動キャンセルモードが選択可能) | ||||||
| 13 | NC | 何も接続しないで下さい | ||||||
| 14 | NC | 何も接続しないで下さい | ||||||
| 15 | 出力 | PM1 | 目標位置番号出力(目標位置番号:PC1,PC2,PC4,PC8の示す合計)。 RCB0411、RCB0411-G5では出力されていません。 |
|||||
| 16 | PM2 | 目標位置番号出力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) RCB0411、RCB0411-G5では出力されていません。 |
||||||
| 17 | PM4 | 目標位置番号出力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) RCB0411、RCB0411-G5では出力されていません。 |
||||||
| 18 | PM8 | 目標位置番号出力(目標位置番号:PC1,PC2,PC4,PC8の示す合計) RCB0411、RCB0411-G5では出力されていません。 |
||||||
| 19 | PFIN | 位置決め完了出力(目標位置に停止した時、オンになります) | ||||||
| 20 | ZFIN | 原点復帰完了出力(原点復帰後、オンになります) | ||||||
| 21 | ZONE | ゾーン信号出力(予め、指定した領域内に入っている時、オンになります) | ||||||
| 22 | *ALM | アンプ警報出力(正常時はオンを出力します) | ||||||
| 23 | VB | 回生ユニットを使用時に接続します。それ以外では接続しないで下さい。 | ||||||
| 24 | FG | フレームグランド | ||||||
|
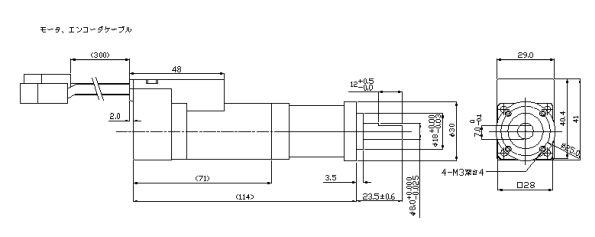
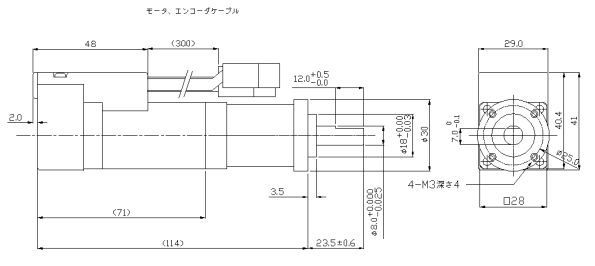
外形図
|
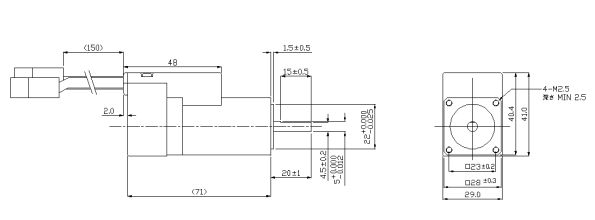
図1.システム型名:RSA0241 (シャフトDカット) |
||
 |
||
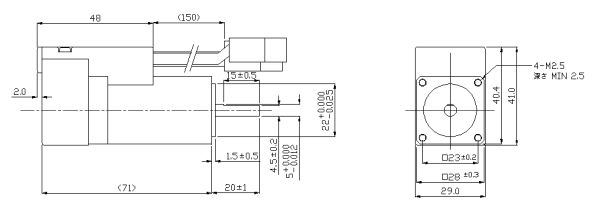
図2.システム型名:RSA0242 (折返しタイプ、シャフトDカット) |
||
 |
||
|
図3.システム型名:RCB0411
(モータアンプ一体型、シャフトDカット) |
||
 |
||
|
図4.システム型名:RSA0411
(シャフトDカット) |
||
 |
||
|
図5.システム型名:RSA0611 / RSA0911 /
RSA1211 / RSA1611 (シャフトDカット) |
||
 |
||
|
図6.システム型名:RSA0611-G1/G2
(シャフトキー溝) |
||
 |
||
図7.システム型名:RSA0241-G5-10-0101
(シャフトDカット) |
||
 |
||
図8.システム型名:RSA0241-G5-10-0101
(シャフトDカット) |
||
 |
||
|
図9.システム型名:RCB0411-G5-06-02
(モータアンプ一体型、シャフトキー溝) |
||
 |
||
|
図10.システム型名:RSA0411-G5-06-0201
(シャフトキー溝) |
||
 |
||
|
図11.システム型名:
RSA0611-G8-05-0201 |
||
 |
||
|
図10.システム型名:
RSA1211-G8-05-0201 |
||
 |
||
|
図11.サーボアンプ外形図(ギア付き/ギア無しとも共通)
|
||
 |
||
 |
||
| 安全規格について | |
 |
Rシリーズサーボシステム(RCB0411 を除く) 並びに SCN5 シリーズメカシリンダには、下記のEC指令に適合することを示すCEマークを貼付しております。
EMC Directive 89/336/EEG |
| アプリケーション例カタログ | 簡単教示ツールカタログ | 購入ガイドカタログ |
|
その他、ご不明な点がございましたら、下記までお問い合わせください。
|
|
| お問い合わせ先 | |