New series Mecha_cylinder(maximum thrust 20kgf)
|
| Home(Japanese) > Table of contents > SCNB5 > |
 |
We have two types available.
|
| Please use it at times like this | |
| ★ When the conventional SCN5-010 series lacked thrust | |
| ★ When the conventional SCN5-010 series speed insufficient | |
| ★ When the conventional SCN6-020 series want to reduce size | |
 |
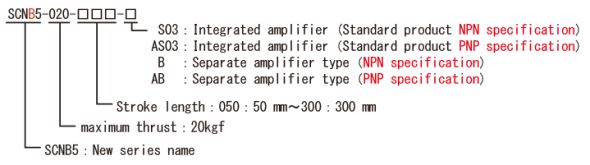
| Model number description | |
 |
|
| Mecha_cylinder electrical specifications |
System model |
SCNB5-020-□□□- S03 / B |
|||||||
Stroke(mm) |
50 | 100 | 150 | 200 | 250 | 300 | ||
Maximum thrust (N) / (kgf) |
200 / 20.4 | |||||||
|
Maximum payload when power is turned on (vertical use) (kg)
|
14 | |||||||
|
Maximum thrust in push mode
(N) / (kgf) |
140 / 14 | |||||||
|
screw lead (mm)
|
6 | |||||||
|
Maximum speed (mm/s) :typ
|
400 | 200 | 160 | 120 | ||||
|
Repeatable positioning accuracy (mm)
|
±0.01 (Short-time
repeatable positioning accuracy) Note 1), Note 2) |
|||||||
|
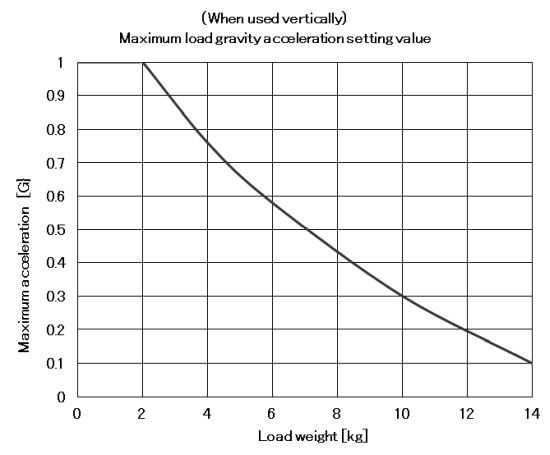
Maximum acceleration setting when vertically used (G) |
The maximum setting value changes depending on the load weight. Note 3 See graph |
|||||||
|
Lost motion (mm)
|
0.3 | |||||||
|
Rod diameter (mm)
|
φ15 | |||||||
|
Rod tip screw diameter
|
M10 pitch 1.25(SUS303) | |||||||
|
Number of positioning points
|
16 (there is no limit when using serial control.) |
|||||||
|
power supply
|
DC24V±10 % ( maximum 2.0 A) | |||||||
|
Input/output signal
|
parallel input signal
|
Signal name
|
DC24V DI/DO interface (connector PIO)
Target position number (4-bit binary: PC1, PC2, PC4, PC8), Start (CSTR), axis movement interlock (ILK) |
|||||
|
input current
|
Max 4mA/port
(Please connect with sink type output circuit) |
|||||||
|
parallel output signal
|
Signal name
|
DC24V DI/DO interface (connector PIO)
Positioning complete (PFIN), alarm (ALM), Zone signal (ZONE), home return complete (ZFIN) Separate amplifier type only (completed position number: PM1, PM2, PM4, PM8 available) |
||||||
|
Output current
|
Max 30mA/port
(It is open collector output) |
|||||||
|
serial signal
|
Serial interface (connector SIO)
+5V、5G、TRx+、TRx- |
|||||||
|
Protection function
|
Overspeed, main power overvoltage,
regenerative voltage abnormality, overload,Sensor abnormality, servo error |
|||||||
|
Environmental condition
|
Operating temperature
|
0 〜 40 ℃ | ||||||
|
storage temperature
|
-20 〜 60 ℃ | |||||||
|
Usage/storage humidity
|
≦ 90 % RH However, there should be no condensation. |
|||||||
|
protective structure
|
IP-40 equivalent | |||||||
|
Vibration/Shockproof
|
2G / 10G (Twice) | |||||||
|
weight(kg)
|
1.1 | 1.2 | 1.4 | 1.6 | 1.8 | 2.0 | ||
| ※) | Due to product improvement, some ratings, specifications, dimensions, etc. may be changed without notice. | ||||||||||||||||
| Note1) | Urethane rubber (Shore 90) for home positioning is used at both stroke ends of the electric cylinder. The aging of urethane rubber is estimated to be a maximum of 0.05 to 0.07 mm/1 to 2 years. Therefore, it is possible that the origin position may shift by up to 0.07mm due to changes over time, so processing such as data correction may be required depending on the user's usage. In addition, the home position when shipped from the factory is the backward end (motor side) home position. When using the home position on the forward end side (opposite the motor side), change it using the teaching tool. | ||||||||||||||||
| Note2) | Positioning is done from one direction. | ||||||||||||||||
| Note3) |
|
||||||||||||||||
 |
|||||||||||||||||
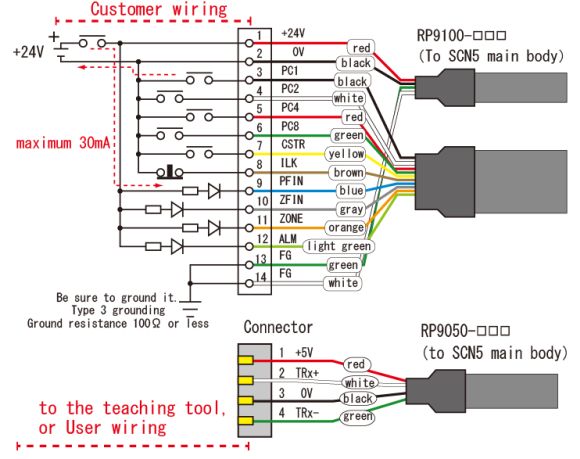
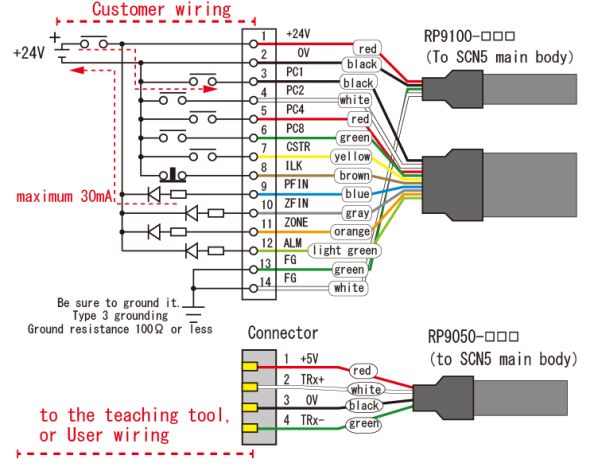
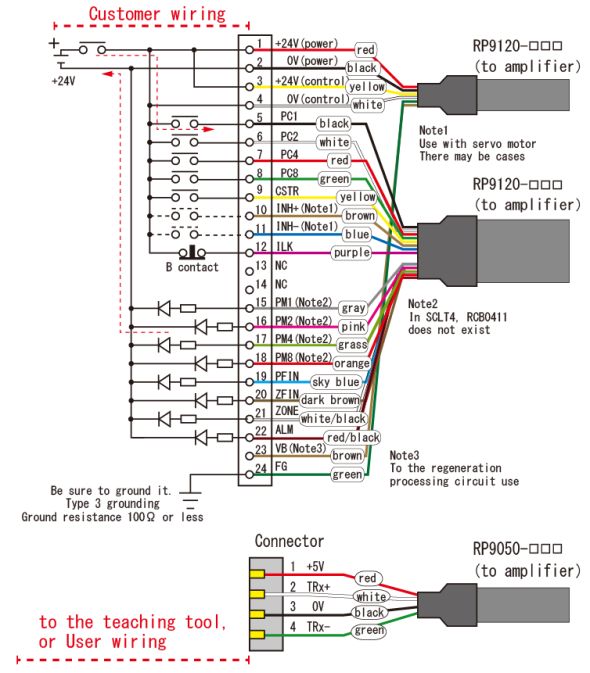
| SCNB5-020-□□□-S03 (NPN specification) External connection diagram |
|
|
|
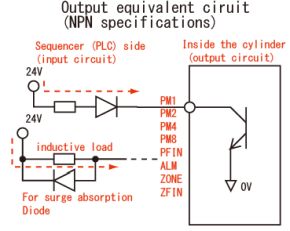
SCNB5-020-□□□-S03 ( NPN specifications
) Input/Output equivalent circuit |
|
 |
 |
| SCNB5-020-□□□-AS03 (PNP specifications)
External connection diagram |
|
|
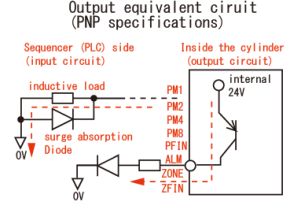
| SCNB5-020-□□□-AS03 (PNP specifications) Input/Output equivalent circuit |
|
 |
 |
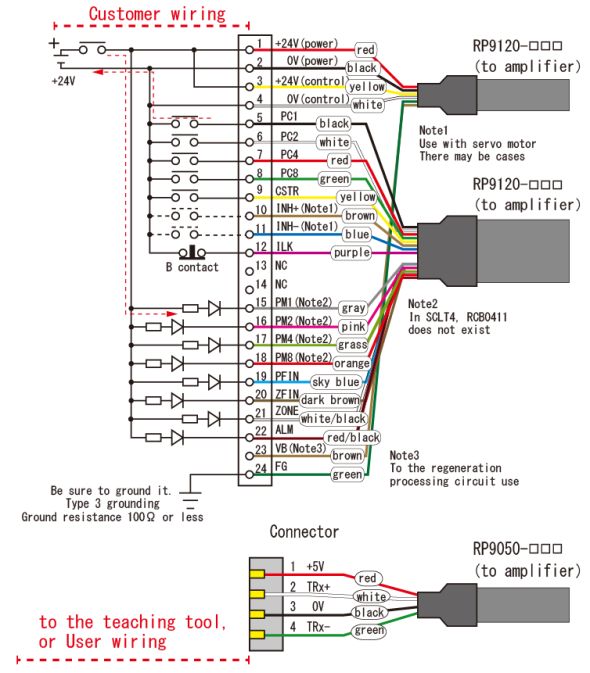
| SCNB5-020-□□□-B (NPN specifications) External connection diagram |
|
|
|
SCNB5-020-□□□-B ( NPN specifications
) Input/Output equivalent circuit |
|
|
|
| SCNB5-020-□□□-AB (PNP specifications) External connection diagram |
|
|
|
SCNB5-020-□□□-AB
( PNP specifications
) Input/Output equivalent circuit |
|
|
|
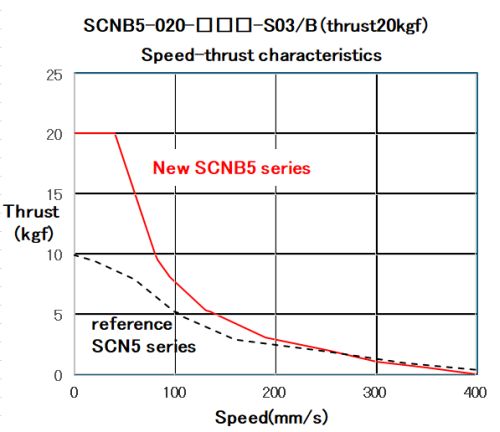
| Speed-thrust characteristics (at 25℃, typical value) | |
 |
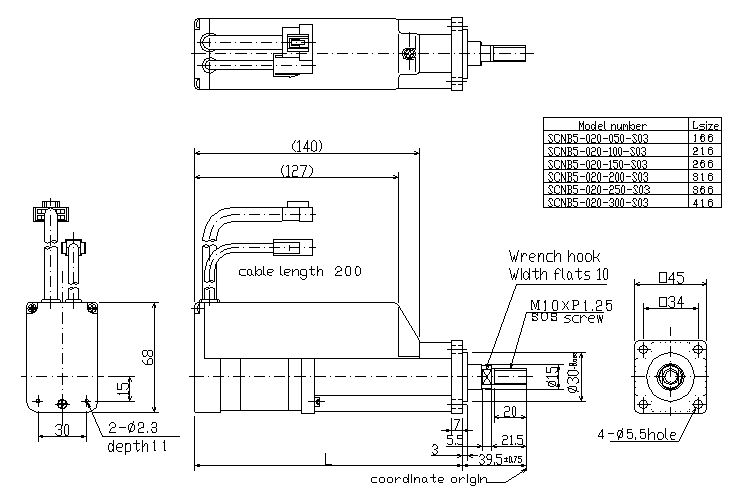
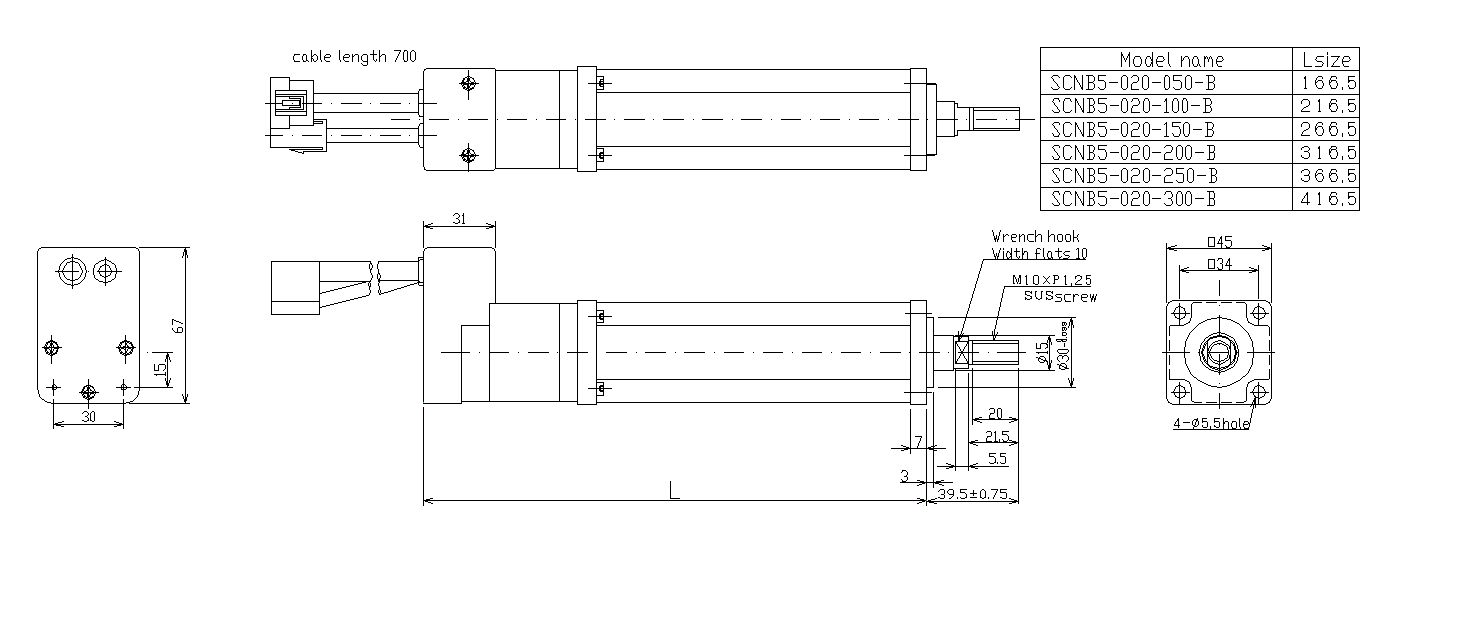
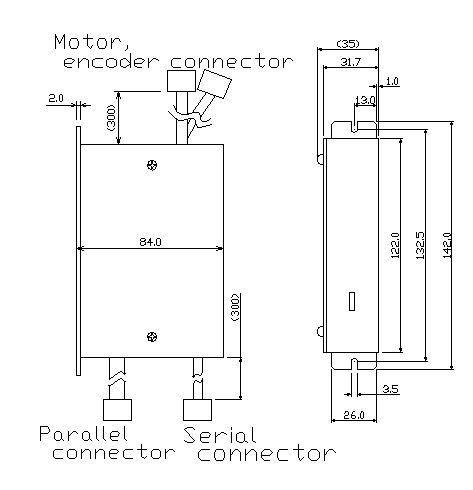
| Dimensions (click on the image below to open an enlarged view) |
|
| Integrated amplifier SCNB5-020-□□□-S03 SCNB5-020-□□□-AS03 |
|
| One nut is included at the end of the rod. | |
 |
|
| Separate amplifier type
main unit SCNB5-020-□□□-B-M SCNB5-020-□□□-AB-M |
|
| One nut is included at the end of the rod | |
 |
|
| Separate amplifier SCNB5-020-□□□-B-A SCNB5-020-□□□-AB-A |
|
 |
|
|
If you have any other questions, please contact us below.
|
|
| Contact information | |